- a. 일반(General)
1. ILS는 활주로에 대한 최종 접근(final approach) 시 항공기의 정확한 정렬(alignment)과 강하(descent)를 위한 접근 경로(approach path)를 제공하도록 설계되었습니다.
2. ILS의 기본 구성 요소는 Localizer, Glide Slope 및 OM(Outer Marker)이며, CAT Ⅱ 또는 CAT Ⅲ 계기 접근 절차와 함께 사용하기 위해 설치된 경우 IM(Inner Marker)로 구성되어 있습니다.
3. 시스템은 기능에 따라 다음 세 부분으로 나눌 수 있습니다.
- (a) 유도 정보(Guidance Information) : Localizer, Glide Slope
- (b) 거리 정보(Range Information) : Marker Beacon, DME
- (c) 시각 정보(Visual Information) : Approach Lights, Touchdown and Centerline Lights, Runway Lights
4. OM(Outer Marker)를 대체하기 위해 다음과 같은 방법을 사용할 수 있습니다.
- (a) Compass Locator 또는
- (b) PAR (Precision Approach Radar; 정밀 접근 레이더) 또는
- (c) ASR (Airport Surveillance Radar; 공항 감시 레이더) 또는
- (d) DME (Distance Measuring Equipment; 거리 측정 장비), VOR (Very High Frequency Omni-directional Range; 전방향 표지 시설), 혹은 표준 계기 접근 절차에서 승인된 NDB fixes (Nondirectional beacon fixes authorized in the Standard Instrument Approach Procedure) 또는
- (e) VOR (Very High Frequency Omni-directional Radio Range; 전방향 표지 시설) 또는
- (f) 표준 계기 접근 절차에서 승인된 NDB fixes (Nondirectional beacon fixes authorized in the Standard Instrument Approach Procedure) 또는
- (g) 표준 계기 접근 절차에서 픽스 식별(fix identification)이 가능한 GPS(Global Positioning System; 위성 항법 시스템)가 장착된 적합한 RNAV 시스템
5. 활주로 양 끝에 완전한 ILS 시스템이 설치된 경우 (예, approach end of RWY 4 및 approach end of RWY 22) ILS 시스템은 동시에 서비스되지 않습니다.
- b. 로컬라이저(Localizer)
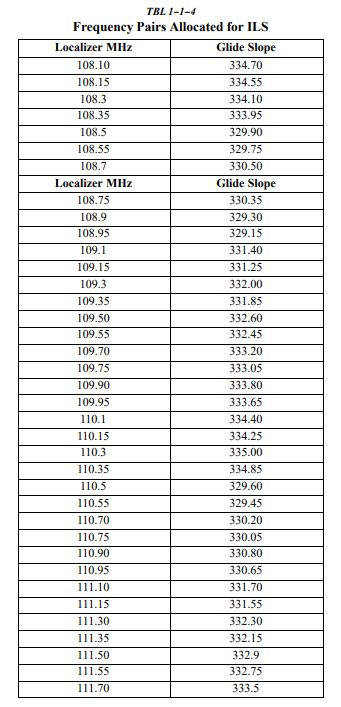
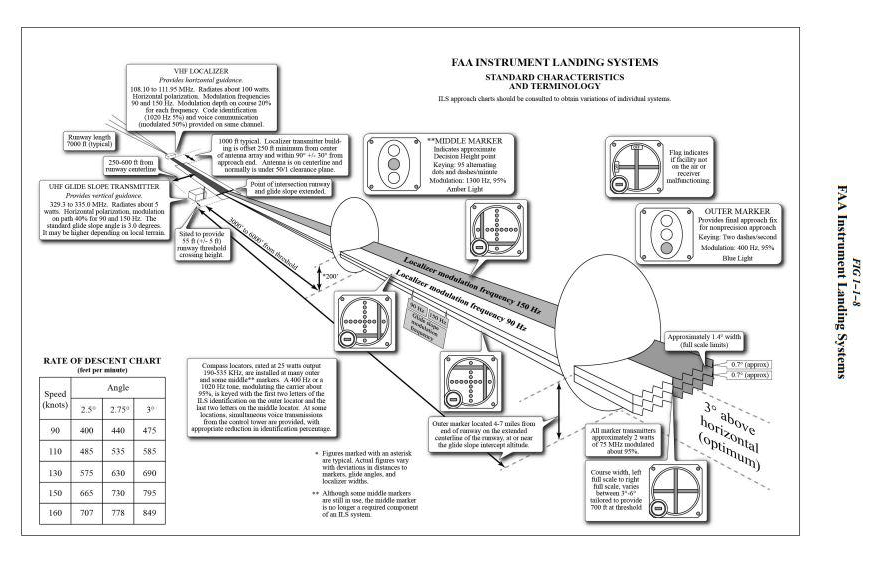
1. 로컬라이저 송신기는 108.0 ~ 111.95 MHz 주파수 범위 내 40개의 ILS 채널 중 하나에서 운용됩니다. 신호는 조종사에게 활주로 중심선에 대한 진로 유도(course guidance)를 제공합니다.
2. 로컬라이저의 접근 경로(approach course)는 전방 코스(front course)라고 불리며, 글라이드 슬롭(glide slope), 마커 비콘(marker beacon) 등과 같이 다른 기능을 하는 부분과 함께 사용됩니다. 로컬라이저 신호는 활주로의 반대편 끝단에서 전송됩니다. 활주로 시단(runway threshold)에서 700 feet {좌측 최대 범위에서 우측 최대 범위까지(full scale fly-left to a full scale fly-right)}의 진로 폭(course width)이 되도록 조절됩니다.
3. 활주로의 연장된 중심선을 따라 전방 코스(front course)와 반대 방향으로 가는 코스 라인(course line)을 백 코스(back course)라고 합니다.
- [Caution] 항공기의 ILS 장비가 역방향 감지 기능(reverse sensing capability)을 포함하지 않는 한, back course 상에서 inbound 비행할 때 off-course 상태에서 on-course로 수정 조작 시에는 needle 편향(deflection) 반대 방향으로 항공기를 조종해야 합니다. 이러한 "flying away from the needle (needle 반대로의 비행)"은 로컬라이저의 front course 상에서 outbound 비행 시에도 필요합니다. 특정 활주로에 대해 back course 접근 절차가 발효되고 ATC에 의해 접근 절차가 인가되지 않는 한, 접근을 위해 back course 신호를 사용해서는 안됩니다.
4. 식별 신호는 국제 모스 부호(International Morse Code)로 되어 있으며, 로컬라이저 주파수로 송신되는 문자 Ⅰ (● ●) 다음에 3자리의 식별 문자로 구성됩니다.
- [EXAMPLE] Ⅰ-DIA
5. 로컬라이저는 course line을 따라 가장 높은 지형의 상공 1,000 feet에서부터 antenna site의 elevation 상공 4,500 feet 고도 사이의 antenna로부터 18 NM 떨어진 거리에서부터 활주로 시단(RWY threshold)까지 descent path 전체에 걸쳐 course guidance를 제공합니다. 다음과 같은 각을 이루고 있는 운용 서비스 범위(operational service volume)의 구역에 적절한 off-course indication이 제공됩니다.
- (a) 안테나로부터 반경 18 NM 이내에서 course의 양쪽 측면 10˚까지
- (b) 반경 10 NM 이내에서 course의 양쪽 측면 10˚부터 35˚까지 (Figure 1-1-6 참조)
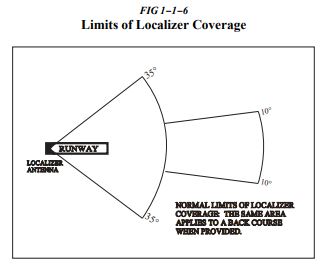
6. 이러한 영역 밖에서 신뢰할 수 없는 신호가 수신될 수 있습니다. ATC는 관제사가 조치를 시작하거나 조종사가 요청하고 레이더 모니터링이 제공될 때 서비스 범위(service volume)를 초과하는 절차에 따라 항공기를 clear 할 수 있습니다. [Paragraph 1-1-9 b5]와 [Figure 1-1-6]에 기술되어 있는 영역은 SSV(Standard Service Volume) Localizer를 나타냅니다. 18 NM SSV를 초과하는 로컬라이저 통달 범위를 포함하는 차트화 된 모든 절차는 ESV(Expanded Service Volume)에 대한 승인 프로세스(approval process)를 거쳤으며 flight inspection에 의해 검증되었습니다. (Figure 1-1-7 참조)

- [Figure 1-1-7] 내 예 해석 : ORD ILS 27L에는 NRMAH fix(26.2 DME에 093˚)가 포함되어 있습니다. NRMAH가 차트화 된 절차로 발효되기 때문에 LOC (Ⅰ-IAC) 신호는 표준 18 NM 서비스 범위를 초과하여 26.2 DME까지 FAA flight inspection에 의해 인증되었습니다.
- c. 로컬라이저형 방향 보조 시설 (LDA; Localizer Type Directional Aid)
1. LDA는 로컬라이저처럼 유용하고 정확하지만, 완전한 ILS의 구성이 아닙니다. 보통 LDA course는 course width가 6˚ 또는 12˚를 갖는 유사 시설인 SDF(단순 지향성 표지 시설; Simplified Directional Facility) 보다 더 정밀한 approach course를 제공합니다.
2. LDA는 활주로와 일직선이 아닙니다. Course와 활주로 사이의 정렬이 30˚를 초과하지 않는 경우 직진입 최저치(Straight-in minimums)가 발효될 수 있습니다. 선회 최저치(circling minimum)는 이 정렬이 30˚를 초과하는 경우에만 발효됩니다.
3. 극소수의 LDA approach만이 glideslope를 포함하고 있습니다. 계기 접근 차트의 plan view(평면도)에 "LDA/Glideslope"라고 표기됩니다. 이러한 절차는 5-4-5항 계기 접근 절차 차트, a7(b) 절, APV(Approach with Vertical Guidance)에 기술된 APV(Approach with Vertical Guidance; 수직 유도 정보가 제공되는 접근 절차)라고 하는 새로 정의된 범주에 속합니다. Glideslope 유무에 대한 LDA minima는 접근 차트의 minima line에 S-LDA/GS와 S-LDA로 표시되어 제공됩니다. Final Approach Course가 활주로 중심선과 일치하지 않기 때문에, ILS 접근과 비교하여 추가적인 조작이 필요합니다.
- d. 활공각/활공로 (Glide Slope/Glide Path)
1. 329.15 MHz ~ 335.00 MHZ 주파수 범위 내에서 40개의 ILS 채널 중 하나로 운용되는 UHF glide slope transmitter는 로컬라이저 front course 방향으로 신호를 송출합니다. "Glide Path" 용어는 로컬라이저와 교차하는 glide slope의 일부를 의미합니다.
- [CAUTION] 로컬라이저 back course approach 영역에 잘못된 glide slope 신호가 존재할 수 있으며, 이로 인해 glide slope flag alarm이 사라지고 신뢰할 수 없는 glide slope 정보가 표시될 수 있습니다. 로컬라이저 back course로 접근할 경우, Approach 및 Landing 차트에 glide slope가 명시되지 않는 한 모든 glide slope 신호 표시를 무시해야 합니다.
2. Glide slope transmitter(송신기)는 접근 활주로 시단(활주로 아래쪽으로)으로부터 750~1,250 feet 사이에 위치하며, 활주로 중심선으로부터 250~650 feet 벗어나 있습니다. Transmitter는 수직으로 폭 1.4˚의 glide path 신호를 전송합니다. 신호는 승인된 ILS 접근 절차에 명시되어 있는 결심 고도(DH, Dicision Height)까지 강하할 수 있도록 강하 정보를 제공합니다. 인가된 최저 DH 미만으로의 운항에 glide path를 사용하기에는 적합하지 않을 수 있으며, 이 고도 미만에서 glide path 지시에 대한 참조는 runway enviornment에 대한 시각 참조물로 보완되어야 합니다. 발효된 DH가 없는 glide path는 RWY threshold까지 사용할 수 있습니다.
3. Glide path projection angle(투사각)은 RWY elevation 상공 약 200 feet에서 MM와 교차하고 약 1,400 feet에서 OM와 교차하기 위해 일반적으로 수평선 상부 3˚로 조정됩니다. 보통 glide slope는 10 NM 거리까지 사용할 수 있습니다. 하지만 glide slope가 10 NM을 초과하는 ESV에 대해 승인된 지역도 있습니다.
4. 조종사는 glide path interception에 접근할 때 주의를 기울여야 합니다. 잘못된 course와 reverse sensing은 발효된 course 보다 훨씬 큰 각도에서 발생할 수 있습니다.
5. 지시되는 glide path를 유지하기 위해 최대한 노력해야 합니다.
- [CAUTION] obstacle/terrain clearance를 보장하기 위해 glide path 아래로 비행하는 것을 피해야 합니다.
6. 발효된 glide slope TCH(활주로 시단 통과 높이; Threshold Crossing Height)는 RWY Threshold 상공 실제 glide path의 on-course를 지시하는 높이를 나타내는 것은 아닙니다. TCH는 항공기가 RWY Threshold 4 mile에서부터 MM(Middle Marker) glide path 구간까지 형성되는 궤적(경로)을 유지할 경우, 항공기의 glide slope antenna가 통과하게 될 RWY Threshold 상공의 높이를 나타내는 비행 계획 목적의 참조로 사용됩니다.
7. 조종사는 항공기의 glide slope antenna와 landing configuration에서 main gear와의 수직 높이를 알고 있어야 하며, DH에서 RWY Threshold 상공에서 바퀴 통과 높이(wheel crossing height)가 발효된 TCH를 충족시키지 못할 수 있다면 적절하게 descent angle를 조절할 계획을 수립해야 합니다. 테스트 결과 충분한 바퀴 통과 높이는 항공기 기종에 좌우되며, 약 20~30 feet인 것으로 나타났습니다.
- [Note] 활주로의 TCH는 평소에 활주로를 사용하는 가장 큰 항공기 category, 공항 배치가 glide slope 안테나 위치에 영향을 미치는 정도, 그리고 지형 등의 여러 가지 요소에 의해 설정됩니다. 동일한 glide path angle에서 최적의 TCH보다 높으면 flare를 하기 전까지 접근 경로(trajectory)가 유지될 경우 threshold로부터 멀리 떨어진 곳에 touch down 할 수 있습니다. 조종사는 항공기 정지에 이용할 수 있는 활주로에 대한 높은 TCH의 영향을 고려해야 합니다.
- e. 거리 측정 시설 (DME; Distance Messuring Equipment)
1. ILS와 함께 설치되고 접근 절차에 명시된 경우, DME는 다음과 같이 사용될 수 있습니다.
- (a) OM를 대신
- (b) BC(back course) FAF(Final Approach Fix)로서
- (c) Localizer course에서 그 밖의 fix를 설정하기 위해
2. 경우에 따라서는, TERPS(Terminal Instrument Procedures)의 제한 범위 내에서 다른 시설의 DME를 사용할 수 있습니다.
- (a) ARC initial approach segement를 제공하기 위해
- (b) BC approach를 위한 FAF로서
- (c) OM을 대신해서
- f. 마커 비콘 (Marker Beacon)
1. ILS Marker Beacon의 정격 출력은 3 watt 이하이며, 안테나 배열(array)은 안테나보다 약 1,000 feet 위에서 약 2,400 feet 폭과 4,200 feet의 길이의 범위를 가진 타원형 모양을 형성하도록 설계되어 있습니다. ILS Marker Beacon을 올바르게 수신하기 위해 선택적 감도 기능(selective sensitivity feature)이 있는 항공기 탑재 Marker Beacon receiver는 항상 "Low" 감도 위치(sensitivity position)에서 작동해야 합니다.
2. ILS system은 관련된 OM을 가질 수 있습니다. MM는 더 이상 필요하지 않습니다. Category Ⅱ ILS가 있는 위치에는 IM도 있습니다. 지상 항법 장비와 공중 항공 전자 기기의 발전뿐만 아니라, marker beacon의 대체 수단으로 사용될 수 있는 수많은 수단 때문에, marker beacon의 현재 요건은 다음과 같습니다.
- (a) OM 또는 적절한 대체 장비가 NPA(Nonprecision approach) 운용을 위한 FAF(Final Approach Fix)를 식별합니다. (예 : 로컬라이저만)
- (b) MM는 착륙 활주로 시단(landing threshold)으로부터 약 3,500 feet 떨어진 위치를 나타냅니다. 이 위치는 glide path 상의 항공기가 touchdown zone 약 200 feet 상공의 elevation에 있을 때의 위치이기도 합니다. MM은 더 이상 운용상 필요하지 않게 되었습니다. 일부 MM는 여전히 사용 중이지만, FAA에 의해 새로운 ILS site에 설치되는 MM는 없습니다.
- (c) IM는 (설치된 경우) 항공기가 CAT Ⅱ ILS approach 동안 glide path 상 DH에서의 지점을 나타냅니다. IM는 오직 RA(Radio Altitude) minimum이 발효되지 않은 CAT Ⅱ 운용에만 필요합니다.
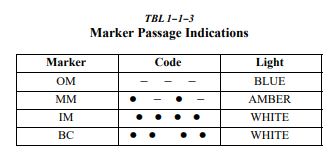
3. Back course marker는 일반적으로 approach descent가 시작되는 ILS back course FAF를 나타냅니다.
- g. 컴퍼스 로케이터 (Compass Locator)
1. Compass Locator 송신기(transmitter)는 일반적으로 MM과 OM가 설치된 곳에 위치합니다. Transmitter의 출력은 25 watt 이하, 범위는 최소 15 miles이며 190 ~ 535 kHz에서 운용됩니다. 일부 지역에서는 최대 400 watt의 고출력 radio beacon이 OM compass locator로 사용됩니다.
2. Compass locator는 2자리 문자의 식별 부호 그룹(identification group)을 송신합니다. Outer locator는 locator 식별 부호 그룹의 첫 2자리 문자를 송신하고, middle locator는 locator 식별 부호 그룹의 마지막 2자리 문자를 송신합니다.
- h. ILS 주파수 (ILS Frequency) (Table 1-1-4 참조)

- i. ILS 최저치 (ILS Minimums)
1. 정상 작동하는 모든 필수 지상 및 항공기 탑재 시스템 구성 요소에 따라 최소 공인(the lowest authorized) ILS minimum은 다음과 같습니다.
- (a) Category Ⅰ. DH 200 feet, RVR 2,400 feet (touchdown zone 및 centerline lighting이 있을 경우, RVR 1,800 feet), 또는 (Autopilot, FD, 혹은 HUD 사용 시, RVR 1,800 feet)
- (b) Special Authorization Category Ⅰ. DH 150 feet, RVR 1,400 feet, DH까지 HUD 사용
- (c) Category Ⅱ. DH 100 feet, RVR 1,200 feet (touchdown까지 autoland나 HUD를 사용하고 인가에 언급된 경우, RVR 1,000 feet)
- (d) Special Authorization Category Ⅱ with Reduced Lighting. DH 100 feet, 접지 시까지 autoland나 HUD를 사용하고 인가에 언급된 경우, RVR 1,200 feet (touchdown zone, centerline lighting, 그리고 ALSF-2는 필요하지 않음)
- (e) Category Ⅲa. DH 100 feet 미만 또는 DH 적용하지 않음, RVR 700 feet 이상
- (f) Category Ⅲb. DH 50 feet 미만 또는 DH 적용하지 않음, RVR 700 feet 미만 150 feet 이상
- (g) Category Ⅲc. DH 및 RVR 제한 적용하지 않음
- [Note] Category Ⅱ와 Ⅲ는 특별 인가와 장비가 요구됩니다.
- j. ILS 구성요소 부작동 (Inoperative ILS Components)
1. Inoperative localizer. localizer가 고장 났을 경우, ILS approach는 허가되지 않습니다.
2. Inoperative glide slope. glide slope가 고장 났을 경우, ILS는 non-precision localizer approach로 전환됩니다.
- [Reference] 작동하지 않는 항공기 탑재 또는 지상 시스템 장비로 인한 minimum에 대한 adjustment는 미국 정부 TPP(터미널 절차 간행물; Terminal Procedure Publication)의 inoperative componeent table(부작동 장비 목록)을 참조하시면 됩니다.
- k. ILS 진로 왜곡 (ILS Course Distortion)
1. 모든 조종사는 지상 차량이나 항공기가 localizer 또는 glide slope antenna 주변에서 운행할 때에는 ILS localizer와 glide slope course에 방해가 될 수 있다는 것을 알아야 합니다. 대부분의 ILS 시설은 지상 차량, 항공기 또는 이들 모두에 의해 신호 간섭을 받을 수 있습니다. ILS critical area(ILS 보호구역)은 각 localizer 및 glide slope antenna 근처에 설정됩니다.
2. ATC는 다음과 같이 ATCT(공항 교통 관제탑; Airport Traffic Control Tower)가 운영되는 시간 동안 관제 공항(controlled airport)의 ILS critical area 내에서 간섭을 피하기 위한 관제 지시를 발행합니다.
- (a) Weather Conditions. 공식 기상 관측 결과, ceiling 800 feet 미만 및/또는 visibility 2 miles 미만입니다.
- (b) Localizer Critical Area. land(착륙), exit a runway(활주로 개방), depart(출발), 또는 missed approach(실패 접근)을 하는 항공기를 제외하고 도착 항공기(arriving aircraft)가 OM 또는 OM 대신 사용되는 fix 안쪽에 있을 때 차량과 항공기는 critical area 내 또는 상공으로 운행이 허가되지 않습니다. 또한 공식 기상 관측치가 200 feet 미만의 ceiling 또는 2,000 feet 미만의 RVR인 경우, 도착 항공기가 MM 안쪽에 있거나 MM이 없는 경우 final 1/2 mile 안쪽에 있지 않을 때에는 차량 및 항공기의 운행이 허가되지 않습니다.
- (c) Glide Slope Critical Area. 도착 항공기(arriving aircraft)가 ILS OM 또는 OM 대신 사용되는 fix 안쪽에 있을 때 해당 지역 내 또는 상공에서 차량 혹은 항공기 운행을 허가하면 안 됩니다. 단, 도착 항공기가 활주로를 in sight 하고 다른 활주로에 착륙하기 위해 circling 또는 side-stepping 하는 경우는 예외입니다.
- (d) Weather Conditions. ceiling 800 feet 및/또는 visibility 2 miles 이상
- 이러한 기상상태에서는 critical area를 보호하기 위한 조치가 취해지지 않습니다.
- 이러한 기상상태에서 운항승무원은 AUTOLAND(자동 착륙) 또는 COUPLED approach(복합 접근)를 수행할 것이라는 걸 관제탑에 통지해야 합니다.
- [Example]
#Denver Tower, United 1153, Request Autoland/Coupled Approach (runway)
ATC replies with :
#United 1153, Denver Tower, Roger, Critical Areas not protected
3. OM와 공항 사이에서 5,000 feet 미만에서 holding 중인 항공기는 ILS approach를 하는 항공기에 대해 localizer 신호 변화를 일으킬 수 있습니다. 따라서 기상 또는 visibility conditions이 ceiling 800 feet 및/또는 visibility 2 miles 미만일 경우, 이러한 holding은 허가되지 않습니다.
4. 조종사들은 ATC 통제를 받지 않는 차량 운행이 ILS course 또는 glide slope 신호의 순간적인 deviation(편차)를 일으킬 수 있다는 점에 주의해야 합니다. 또한 critical area는 기상 또는 visibility conditions이 요구되는 보호 기준(requiring protective measures) 이상일 때, 비관제 공항(uncontrolled airport) 또는 관제탑이 운영되는 공항에서도 보호되지 않습니다. Coupled 또는 autoland 운항을 하는 항공기는 자동 비행 조종 시스템을 모니터링할 때 특히 주의해야 합니다. (Figure 1-1-8 참조)
- [Note] 비행 표준(Flight Standards)을 통해 달리 조정되지 않는 한, Category Ⅰrunway에 대한 ILS 신호는 DA(Decision Altitude)보다 100 feet 낮은 지점 미만에서 비행 검사를 받지 않습니다. 이 고도 아래에서 유도 신호(guidance signal)의 이상현상이 발생할 수 있습니다.
※ Aeronautical Information Manual (AIM) Basic with Change 1 (PDF) (Effective 12/2/2021) 해석
'자습 [AIM, FAA] > CH 1. Air Navigation' 카테고리의 다른 글
| 1-1-12. 음성 기능이 있는 NAVAID (NAVAIDs with Voice) (0) | 2022.04.11 |
|---|---|
| 1-1-11. 정비 중 NAVAID 식별 부호 제거 (NAVAID Identifier Removal Maintenance) (0) | 2022.04.09 |
| 1-1-8. 항행 안전 시설 서비스 범위 (NAVAID Service Volumes) (0) | 2022.04.01 |
| 1-1-7. 거리 측정 시설 (DME; Distance Measuring Equipment) (0) | 2022.03.26 |
| 1-1-6. 전방향 표지 시설/전술 항행 표지 시설(VHF Omni-directional Range/Tactical Air Navigation; VORTAC) (0) | 2022.03.25 |